👁️ OpenCV实战:从图像处理到深度学习的全面指南
摘要:本文深入浅出地探讨了 OpenCV 库在图像处理和深度学习中的应用。从基本概念和操作,到复杂的图像变换和深度学习模型的使用,文章以详尽的代码和解释,带领大家步入 OpenCV 的实战世界。
什么是 OpenCV?
OpenCV(Open Source Computer Vision Library)是一个开源的计算机视觉和机器学习软件库。它由一系列 C 函数和少量 C++ 类构成,同时提供 Python、Java 和 MATLAB 等语言接口,实现了图像处理和视觉方面的许多通用算法。
OpenCV 的设计目标是提供一套简单且可扩展的工具,方便在实际应用、研究和开发中快速部署。
OpenCV 的历史与发展
OpenCV 起源于 1999 年英特尔(Intel)的一个研发项目。2000 年正式开源,旨在推动视觉技术在学术界和工业界的普及。经过二十余年的迭代,OpenCV 已经从最初的传统图像处理库,进化为集成了深度学习(DNN)、硬件加速(OpenCL/CUDA)的综合性平台,成为全球最流行的计算机视觉库。
OpenCV 的应用领域
OpenCV 的应用场景极其广泛:
- 人脸与物体识别:安全监控、生物识别、智能门禁。
- 视频分析:运动检测、目标跟踪、行为识别。
- 3D 重建与增强现实 (AR):通过相机标定生成 3D 模型或 AR 视觉。
- 机器学习与深度学习:内置大量分类器,并支持加载外部深度学习模型。
OpenCV 的环境安装
安装完成OpenCV后,我们可以在Python环境中导入cv2模块来使用OpenCV的功能。你可以创建一个新的Python脚本,然后在其中输入以下代码来测试OpenCV是否安装成功:
import cv2
# 打印 OpenCV 版本
print(f"当前版本: {cv2.__version__}")
如果输出了你所安装的OpenCV版本号,那么恭喜你,你已经成功安装并配置好了OpenCV!
图像的载入、显示和保存
在 OpenCV 中,图像操作的核心三部曲是:使用 cv2.imread() 载入图像,使用 cv2.imshow() 弹出窗口显示,以及使用 cv2.imwrite() 将处理结果固化到磁盘。
核心示例
import cv2
import sys
# 载入图像 (默认读取为 BGR 彩色模式)
img = cv2.imread('image.jpg')
# 健壮性检查:确保文件路径正确且文件未损坏
if img is None:
sys.exit("错误:无法读取图像,请检查文件路径是否正确。")
# 显示图像
# 第一个参数是窗口标题,第二个参数是图像对象
cv2.imshow('Image Display', img)
# 等待键盘输入:0 表示无限期等待,直到按下任意键
cv2.waitKey(0)
# 释放内存:关闭所有由 OpenCV 创建的窗口
cv2.destroyAllWindows()
# 保存图像
# 可以通过文件后缀名自动识别格式(如 .jpg, .png, .webp)
cv2.imwrite('output_processed.jpg', img)
图像的基础操作
OpenCV 的图像在 Python 中本质上是 NumPy 多维数组 (ndarray)。因此,我们可以利用矩阵切片实现极高性能的操作。
1. 像素操作与属性获取
# 获取属性
h, w, c = img.shape # 高度、宽度、通道数
print(f"维度: {img.shape} | 总像素: {img.size} | 数据类型: {img.dtype}")
# 访问特定像素 (注意顺序是:y, x / 行, 列)
px = img[100, 100]
print(f"坐标(100,100)处的BGR值: {px}")
# 修改像素值 (例如将该点设为蓝色)
img[100, 100] = [255, 0, 0]
2. ROI
ROI 是计算机视觉任务中的关键概念,通过切片可以快速提取目标区域。
# 提取坐标为 (y:100~200, x:100~200) 的矩形区域
roi = img[100:200, 100:200]
# 你甚至可以将 ROI 贴回到原图的其他位置
# img[300:400, 300:400] = roi
3. 通道拆分与合并
# 拆分通道 (OpenCV 默认顺序是 Blue, Green, Red)
b, g, r = cv2.split(img)
# 合并通道
img_merged = cv2.merge((b, g, r))
# 进阶:如果只想将红色通道全部清零
# img[:, :, 2] = 0
图像色彩空间的转换
虽然 OpenCV 提供了超过 200 种转换方法,但在实际工程中,最核心的是将 BGR 转换为 灰度图 (Gray)(用于特征检测)和 HSV(用于颜色过滤)。
常用转换代码
# 1. 转换为灰度图:大幅降低计算量,常用于边缘检测和人脸识别
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
# 2. 转换为 HSV 空间:符合人类视觉,非常适合根据颜色提取特定物体
# H (色调), S (饱和度), V (亮度)
hsv = cv2.cvtColor(img, cv2.COLOR_BGR2HSV)
# 3. 转换为 RGB:如果你需要使用 Matplotlib 进行绘图展示,必须进行此转换
img_rgb = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
专业贴士: > 为什么习惯用 HSV 而非 BGR 进行颜色识别?
因为在 BGR 空间中,光照的变化会同时改变 B、G、R 三个分量;而在 HSV 中,光照变化主要反映在 V (Value) 分量上,色调 H (Hue) 相对稳定,这使得颜色过滤更加鲁棒。
在计算机视觉中,图像处理是连接“原始像素”与“语义理解”的桥梁。它包括阈值化、边缘检测、滤波降噪和形态学操作等关键步骤。下面我们将深入探讨这些核心技术。
1. 图像阈值化与二值化
二值化(Binarization)是图像处理的第一步,旨在将图像简化为黑白两色,从而突出目标物体。OpenCV 使用 cv2.threshold() 实现这一功能。
核心代码
import cv2
import numpy as np
# 以灰度模式加载图像
img = cv2.imread('image.jpg', cv2.IMREAD_GRAYSCALE)
# 基础阈值化:将大于 127 的像素设为 255 (白色),其余设为 0 (黑色)
ret, thresh1 = cv2.threshold(img, 127, 255, cv2.THRESH_BINARY)
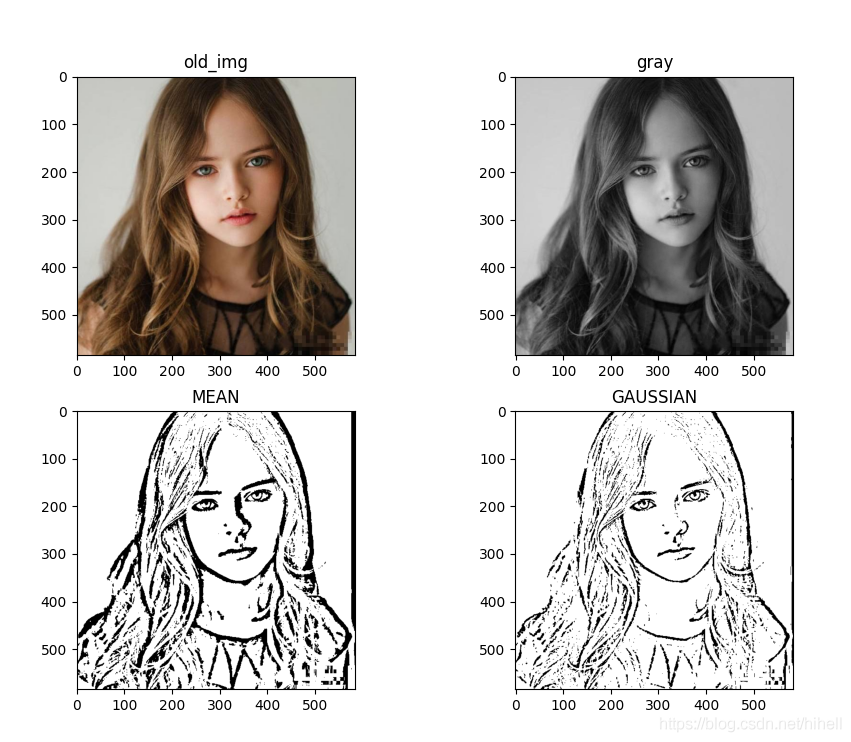
# 进阶建议:自适应阈值 (Adaptive Thresholding)
# 能够处理光照不均匀的场景
adaptive_thresh = cv2.adaptiveThreshold(img, 255, cv2.ADAPTIVE_THRESH_GAUSSIAN_C,
cv2.THRESH_BINARY, 11, 2)
2. 边缘检测 (Edge Detection)
边缘检测通过识别像素强度的显著变化来勾勒物体的轮廓。Canny 算子因其信噪比高、定位准确,至今仍是工业界的首选。
核心代码
# Canny 边缘检测
# 100 和 200 分别是低阈值和高阈值,建议根据图像噪声调整
edges = cv2.Canny(img, 100, 200)
# 显示处理结果
cv2.imshow('Canny Edges', edges)
cv2.waitKey(0)
3. 图像滤波 (Image Filtering)
滤波的主要目的是平滑去噪。在深度学习预处理中,滤波可以有效减少高频噪声对特征提取的干扰。
- 均值滤波 (
blur):取邻域平均值,简单但容易使图像模糊。
- 高斯滤波 (
GaussianBlur):根据距离权重加权,最符合自然图像特征。
- 中值滤波 (
medianBlur):对去除“椒盐噪声”有奇效。
核心代码
# 使用高斯滤波进行平滑处理 (5x5 是核大小,0 表示自动计算标准差)
gaussian_blur = cv2.GaussianBlur(img, (5, 5), 0)
# 使用中值滤波去除噪点
median_blur = cv2.medianBlur(img, 5)
4. 图像形态学操作 (Morphology)
形态学操作是基于形状的一系列数学运算,常用于清理二值化后的细小噪点。
- 腐蚀 (Erosion):收缩物体边界,消除细小的白色噪点。
- 膨胀 (Dilation):扩张物体边界,连接被断开的物体部分。
- 开运算 (Opening):先腐蚀后膨胀,用于移除外部噪点。
- 闭运算 (Closing):先膨胀后腐蚀,用于填充物体内部的小孔。
核心代码
# 定义结构元素 (5x5 矩阵)
kernel = np.ones((5, 5), np.uint8)
# 膨胀:让白色区域“生长”
dilation = cv2.dilate(img, kernel, iterations=1)
# 腐蚀:让白色区域“收缩”
erosion = cv2.erode(img, kernel, iterations=1)
# 闭运算:填充物体内黑洞
closing = cv2.morphologyEx(img, cv2.MORPH_CLOSE, kernel)
掌握上述基础操作后,你已经具备了处理工业视觉、OCR 预处理或传统识别任务的核心能力。图像处理不仅仅是调用 API,更多的是根据实际的光照、噪声和目标形状来组合这些工具。
1. 人脸检测:从静态到实时
人脸检测是 OpenCV 最经典的实战案例。它主要依赖于 Haar 级联分类器。虽然现在深度学习(如 MTCNN 或 MediaPipe)更流行,但 Haar 级联因其极低的计算开销,依然是嵌入式设备的首选。
1.1 静态图像检测
import cv2
# 使用 cv2.data.haarcascades 确保在不同环境下都能正确找到模型路径
face_cascade = cv2.CascadeClassifier(cv2.data.haarcascades + 'haarcascade_frontalface_default.xml')
img = cv2.imread('face.jpg')
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
# 参数调优:
# scaleFactor: 图像缩放比例,1.1意味着每次缩小10%去匹配特征
# minNeighbors: 确定人脸前的候选矩形数量,值越大检测越严苛
faces = face_cascade.detectMultiScale(gray, scaleFactor=1.1, minNeighbors=5, minSize=(30, 30))
for (x, y, w, h) in faces:
cv2.rectangle(img, (x, y), (x+w, y+h), (0, 255, 0), 2)
cv2.imshow('Faces found', img)
cv2.waitKey(0)
1.2 实时视频流检测
实时检测的核心在于对视频帧(Frame)的循环处理。
cap = cv2.VideoCapture(0) # 0 通常是内置摄像头
while cap.isOpened():
ret, frame = cap.read()
if not ret: break
gray = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)
faces = face_cascade.detectMultiScale(gray, 1.1, 5)
for (x, y, w, h) in faces:
cv2.rectangle(frame, (x, y), (x+w, y+h), (255, 0, 0), 2)
cv2.imshow('Real-time Face Detection', frame)
if cv2.waitKey(1) & 0xFF == ord('q'): break
cap.release()
cv2.destroyAllWindows()
2. 目标跟踪:MeanShift 算法
MeanShift 是一种基于颜色概率分布的跟踪算法。它的核心思想是在反向投影图中寻找概率密度最大的区域。
实战技巧
- 初始窗口:手动设置
track_window 的坐标(c, r, w, h)。
- 颜色空间:使用 HSV 空间可以减少光照干扰。
# [此处保留你原有的 MeanShift 代码逻辑,确保其完整性]
# 建议:在实际应用中,可以使用 cv2.selectROI() 来交互式选择跟踪目标
# track_window = cv2.selectROI('tracking', frame, False)
3. Canny 边缘检测
Canny 算法不仅是数学上的精妙,更是自动驾驶(车道线检测)等领域的基石。
img = cv2.imread('road.jpg', 0)
# 技巧:在边缘检测前进行高斯模糊,可以显著减少噪声生成的假边缘
img_blur = cv2.GaussianBlur(img, (5, 5), 0)
edges = cv2.Canny(img_blur, 50, 150)
4. 图像拼接 (Stitcher):全景图生成
OpenCV 的 Stitcher 类封装了特征点匹配(SIFT/ORB)、几何变换和图像融合等复杂流程,只需几行代码即可实现全景拼接。
代码优化
import cv2
img1 = cv2.imread('road1.jpg')
img2 = cv2.imread('road2.jpg')
# 创建拼接器对象 (在 4.x/5.x 版本中建议使用 create 方法)
stitcher = cv2.Stitcher.create()
status, pano = stitcher.stitch([img1, img2])
if status == cv2.Stitcher_OK:
cv2.imshow('Panorama Result', pano)
cv2.waitKey(0)
else:
# 状态码说明:1=需要更多图像, 2=特征点匹配失败, 3=相机参数估计失败
print(f"拼接失败,状态码: {status}")
本章的实战案例展示了 OpenCV 从“看到边缘”到“识别人脸”再到“缝合视野”的能力。掌握这些模块的组合使用,你就能构建出诸如自动驾驶辅助、智能监控等复杂的视觉系统。
OpenCV 与深度学习:DNN 模块实战
OpenCV 的 dnn 模块并不负责“训练”模型,而是专注于高效的推理(Inference)。它支持将 TensorFlow、PyTorch、Caffe 和 ONNX 等框架训练好的模型无缝集成到生产环境中。
1. 加载预训练模型
加载模型是推理的第一步。OpenCV 提供了针对不同框架的读取函数。
import cv2
# 加载 Caffe 模型 (需配置文件 .prototxt 和权重文件 .caffemodel)
net = cv2.dnn.readNetFromCaffe('bvlc_googlenet.prototxt', 'bvlc_googlenet.caffemodel')
# 提示:如果是 ONNX 格式(目前最通用),建议使用:
# net = cv2.dnn.readNetFromONNX('model.onnx')
2. 图像分类 (Image Classification)
图像分类是识别整个图像“是什么”。在将图像喂给神经网络之前,必须通过 blobFromImage 进行标准化处理(缩放、去均值、通道交换)。
import cv2
import numpy as np
# 1. 加载标签
with open('synset_words.txt', 'r') as f:
labels = [line.strip().split(' ', 1)[1] for line in f.readlines()]
# 2. 预处理:创建 4D Blob
# (224, 224) 是 GoogLeNet 的输入尺寸,(104, 117, 123) 是均值减法参数
image = cv2.imread('image.jpg')
blob = cv2.dnn.blobFromImage(image, 1.0, (224, 224), (104, 117, 123))
# 3. 推理
net.setInput(blob)
outputs = net.forward()
# 4. 解析结果
class_id = np.argmax(outputs)
print(f"预测类别: {labels[class_id]} | 置信度: {outputs[0][class_id]:.2f}")
3. 物体检测 (Object Detection - YOLO)
物体检测不仅要识别类别,还要定位位置。以下代码针对 YOLOv3/v4 进行了接口兼容性修复。
import cv2
import numpy as np
# 加载 YOLO 权重与配置
net = cv2.dnn.readNet('yolov3.weights', 'yolov3.cfg')
# 获取输出层名称 (兼容性修复)
layer_names = net.getLayerNames()
try:
# 针对较旧版本的 OpenCV 返回索引的处理
output_layers = [layer_names[i - 1] for i in net.getUnconnectedOutLayers()]
except:
# 针对新版本直接返回名称的处理
output_layers = [layer_names[i] for i in net.getUnconnectedOutLayers()]
image = cv2.imread('image.jpg')
h, w = image.shape[:2]
# YOLO 预处理:1/255 归一化,(416, 416) 尺寸,swapRB=True (BGR转RGB)
blob = cv2.dnn.blobFromImage(image, 1/255.0, (416, 416), swapRB=True, crop=False)
net.setInput(blob)
outputs = net.forward(output_layers)
# 解析检测框
for output in outputs:
for detection in output:
scores = detection[5:]
class_id = np.argmax(scores)
confidence = scores[class_id]
if confidence > 0.5:
# 还原坐标到原始图像尺寸
center_x, center_y, bw, bh = (detection[0:4] * np.array([w, h, w, h])).astype("int")
x = int(center_x - bw / 2)
y = int(center_y - bh / 2)
cv2.rectangle(image, (x, y), (x + bw, y + bh), (0, 255, 0), 2)
cv2.putText(image, f"ID:{class_id} {confidence:.2f}", (x, y-5),
cv2.FONT_HERSHEY_SIMPLEX, 0.5, (0, 255, 0), 2)
cv2.imshow('YOLO Detection', image)
cv2.waitKey(0)
cv2.destroyAllWindows()
结语:计算机视觉的下一站
通过本文的探讨,我们从基础的像素操作、经典的图像变换、边缘检测,一路走到了深度学习驱动的物体识别。
OpenCV 的核心优势在于平衡:
- 它既有传统算法的确定性与高效性(如形态学、Canny 边缘)。
- 又有现代深度学习的强大表征能力(如 DNN 模块)。
未来展望:
随着 OpenCV 5.0 的普及,我们可以预见库将更加深度地集成 3D 视觉处理(如点云操作)和增强现实(AR)技术。同时,随着嵌入式 AI 芯片(如 NPU)的崛起,OpenCV 的底层硬件加速将让移动端的实时视觉推理变得更加顺滑。
无论你是刚入行的新手,还是深耕多年的视觉工程师,OpenCV 都是你工具箱中不可或缺的一件武器。